
ZEB-REVO��һ��ܶ��ӵļ������x��ʹ�������dz����Ρ� �������ֳ֣�Ҳ�����B�ӵ��U�ϣ��Ԏ����������y���|�����y�Խӽ��ĭh(hu��n)����߀�ɰ��b���Ƅ�(d��ng)ƽ�_�ϣ�����܇�v�ϡ�
�a(ch��n)Ʒú���Y�|(zh��)��
�������c(di��n)��
ZEB-REVO�ǻ����Ј��I(l��ng)�ȵ�GeoSLAM�㷨����ͬ����λ��ӳ�䣨SLAM���������ڲ���ҪGPS����r��(sh��)�F(xi��n)���]�h(hu��n)���Ŀ��ل�(d��ng)�B(t��i)ӳ�䡣 �@�N�����ʹZEB-REVO�m���ڸ��N���ӵđ�(y��ng)�ã����и���Ē����ٶȣ����������Σ����ܸ��ࡣ
�~��Ķ���ԣ����ڂ������^���Ԅ�(d��ng)���D(zhu��n)��ZEB-REVO�����ֳ֣���Ҳ�������ڜy���U���������Ԅ�(d��ng)�{���܇��
�߷ֱ��ʣ�ZEB-REVO���ٶȞ�100Hz�����辀��(sh��)��ZEB1��2.5�����Y(ji��)��(g��u)�������c(di��n)�Ƹ�����
���m�У�ZEB-REVO�H��һֻ���ҳߴ�С�����ṩ��ɫ����������
��Ѿ��ȣ��߷ֱ��������ڸ��ƭh(hu��n)�����Ե���ȡ�����ֻ��һ��(g��)�]�h(hu��n)������SLAM�Ĵ����Ќ�(sh��)�F(xi��n)���ߵ��Ԅ�(d��ng)����

����ܛ��
GeoSLAM Hub��Draw����3D���蔵(sh��)��(j��)�D(zhu��n)�Q��ɲ�������Ϣ�����ڎ�犃�(n��i)��3D�c(di��n)�Ɣ�(sh��)��(j��)�D(zhu��n)�Q��ɲ�������Ϣ���Ѓr(ji��)ֵ�Ŀɽ����ɹ�������GeoSLAM�����Ƅ�(d��ng)ӳ���Q������һ���֣�GeoSLAM Hub��Draw���I(y��)���I(l��ng)�ȵ�SLAM��ͬ����λ��ӳ�䣩���g(sh��)�c��(qi��ng)��ĺ�̎�����ܽY(ji��)����һ���ṩ�����Ķ˵��˽�Q������
ܛ������
�� �I(y��)�����M(j��n)��SLAM̎�����ɏ��Ƅ�(d��ng)��(sh��)��(j��)���ɜ�(zh��n)�_��3D�c(di��n)��
�� �Ԅ�(d��ng)ע�Զ���(g��)����͔�(sh��)��(j��)���ĵ��텢�����M(j��n)�п���
����(d��o)�룬�鿴�Ͳ�ԃ������GeoSLAM�Ƅ�(d��ng)ӳ���O(sh��)�䲶�@�Ĕ�(sh��)��(j��)
�� ���ɺ��ο��ٵ�3D�y����2D CAD����
�� �p�Ɍ�(d��o)����(sh��)��(j��)���Ա��c������Ҫ�ĵ�����CAD��GISܛ����һ��ʹ��
���cȫ�����(g��)�������P(gu��n)����ͬ�l(f��)���������ͅf(xi��)��
�@��(g��)��ô�\(y��n)����
GeoSLAM Hub�����J(r��n)�������Ϗ�(qi��ng)���SLAM���棬���к��ε��ϷŹ��ܣ���̎���Ͳ�ԃ������GeoSLAM�Ƅ�(d��ng)�O(sh��)�䲶�@�Ĕ�(sh��)��(j��)�� ���⣬�������O(sh��)���Լ��ĸ�SLAM̎���(bi��o)��(zh��n)����ʹ���������(zh��n)�Ե��҃�(n��i)�h(hu��n)����Ҳ�ܮa(ch��n)����(zh��n)�_�ĽY(ji��)����
�c(di��n)��ע��
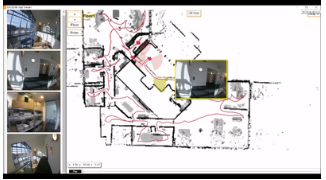
GeoSLAM Hub������һϵ�����ں����c(di��n)��ע�ԵĹ��ߣ�����ʹ�����wĿ��(bi��o)���R����(g��)����͵��텢���� GeoSLAM Hub�Ԅ�(d��ng)���D���cʹ��ZEB-CAM�ռ����c(di��n)�Ɣ�(sh��)��(j��)ͬ��������3D���蔵(sh��)��(j��)���ӿ�ҕ��������Ϣ��

��(d��o)�����픵(sh��)��(j��)
�������Զ��x�Č�(d��o)���x�(xi��ng)������ʹ���ИI(y��)��(bi��o)��(zh��n)��ʽ����LAS��E57������̎���͌�(d��o)����(sh��)��(j��)�� ߀����ʹ���ɫRGB���Ӱֵ�ͷ������攵(sh��)��(j��)��
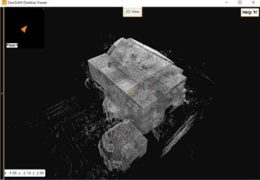
ʹ�����M(f��i)��GeoSLAM Viewer�������Կ����p�ɵ��cͬ�ºͿ͑�����ͬ���D���3D�c(di��n)�Ɣ�(sh��)��(j��)����GeoSLAM Draw Pro���S���l(f��)��3D�c(di��n)�ƣ�2D���֣�ҕ�l�ȡ�
�����ĈDƬ
ͬ���c(di��n)�ƺ͈D��(sh��)��(j��)������2D��3D���p�ɲ鿴�͙z�� - �@��ζ����������ȡ����(bi��o)���ߴ�ͅ^(q��)���Լ�עጽ���������
��������
GeoSLAM Draw��GeoSLAM Hub�е�һ��(g��)ģ�K������һϵ�к������õĹ��ߣ����Կ��ُ��c(di��n)�Ɣ�(sh��)��(j��)����ȡ�nj�ƽ�沼�ֺ����档 ͨ�^�ք�(d��ng)���Ԅ�(d��ng)ʸ���������������ڎ�犃�(n��i)���ɻ����Ľ������֡� ���ڸ����Ľ�ģ�����x����GeoSLAM Draw Pro�ṩ�˄�(chu��ng)����(sh��)�ֵ���ģ�ͣ�DTM�������������ļ�����Ĺ��ߡ�
|
���g(sh��)����(sh��) |
|
|
��� |
30m* |
|
��(sh��)��(j��)�ɼ��� |
43��200�c(di��n)/�� |
|
������ |
ˮƽ0.625�� ��ֱ1.8�� |
|
�Ƕ�ҕҰ |
270���360�� |
|
�Դ늉� |
12.5VDC |
|
������ |
2000mA |
|
�����h(hu��n)���� |
�����ض� 0��~+50�棻������ȣ�85��RH |
|
���b���� |
�ṩ�ɲ�ж�ֱ���Ҳ���ԗUʽ��܇�d |
|
���b |
|
|
���o(h��)�ȼ� |
IP64�����m�����R�� |
|
��|�B���� |
LEMO��� |
|
���� |
����x��1.0kg��������ϵ�y(t��ng)��4.1kg |
|
�ߴ� |
����x��86��113��287mm��������220��180��470mm |
|
늳� |
|
|
늳���� |
DXH12(B)�V�ñ�����늳��� |
|
���� |
5Ah |
|
�~��늉� |
12.5V |
|
��늕r(sh��)�L |
4С�r(sh��)���B�m(x��)ʹ�ã� |
|
��(sh��)��(j��) |
|
|
��(sh��)��(j��)�惦(ch��)���� |
55GB |
|
ԭʼ��(sh��)��(j��)�ļ���С |
ÿ1��犒���s10MB |
|
̎����Ĕ�(sh��)��(j��)�ļ���С |
ÿ1��犒���s8MB |
|
Ĭ�J(r��n)ݔ���ļ���ʽ |
.LAZ�����s��.LAS�� |
|
������ |
�≺���.LAS��(sh��)��(j��)���c������ҪCADܛ�������� |
|
������ |
|
|
���ⰲȫ�ȼ� |
1����ȫ���� |
|
���Ⲩ�L |
905nm |
|
���辀�ٶ� |
100HZ |
|
����x�ֱ��� |
ˮƽ0.625�� |
|
���D(zhu��n)�ٶ� |
0.5HZ |
|
��(zh��n)�_�� |
|
|
�������� |
2-3cm |
|
�^��λ�þ��� |
3-30cm |
|
һЩ�h(hu��n)�����ؿ���Ӱ�܉�E���ȣ����� |
�O�⻬��հı��桢�Ƅ�(d��ng)���w�����˻�܇�v������ɫ�h(hu��n)���������ȣ�����ˮ���]���]�ϵ�ѭ�h(hu��n)��������҃�(n��i)�l���£����Ԍ�(sh��)�F(xi��n)���������ߵľ��ȡ� |
���F(tu��n)����˾�hί������(d��ng)�T��(hu��)���_")
����(j��)ʡί�P(gu��n)��Ѳҕ�����Ľy(t��ng)һ���𣬽��գ�ʡί����Ѳҕ�MѲҕɽ�|ʡ�Ƅ�(chu��ng)���F(tu��n)����˾�hί������(d��ng)�T��(hu��)���_����(hu��)ǰ��ʡί����Ѳҕ�M�M�L�ܽ��A�������_�cɽ�|ʡ�Ƅ�(chu��ng)���F(tu��n)����˾�hί��ӛ�������L������Ҋ���ͨ��(hu��)�����_(d��)��ʡί��Ҫؓ(f��)؟(z��)ͬ־�P(gu��n)��Ѳҕ�������vԒ����ͨ��(b��o)�����P(gu��n)�������š�......More>>
��(j��)���{(l��n)��(d��ng)���⼼�g(sh��)����˾�ĵV�ßo��ͨӍϵ�y(t��ng)���@һϵ�y(t��ng)���@�������V����(n��i)����ͨӍЧ���c��ȫ�ԣ���V�I(y��)��I(y��)����ȫ�µļ��g(sh��)�w�(y��n)����ϵ�y(t��ng)���Ƴ���(bi��o)־���V�I(y��)�o��ͨӍ���g(sh��)��һ���ش�������......More>>
�V�������S�������x����(bi��o)�C��MFA230136��")
�����C")

")